|
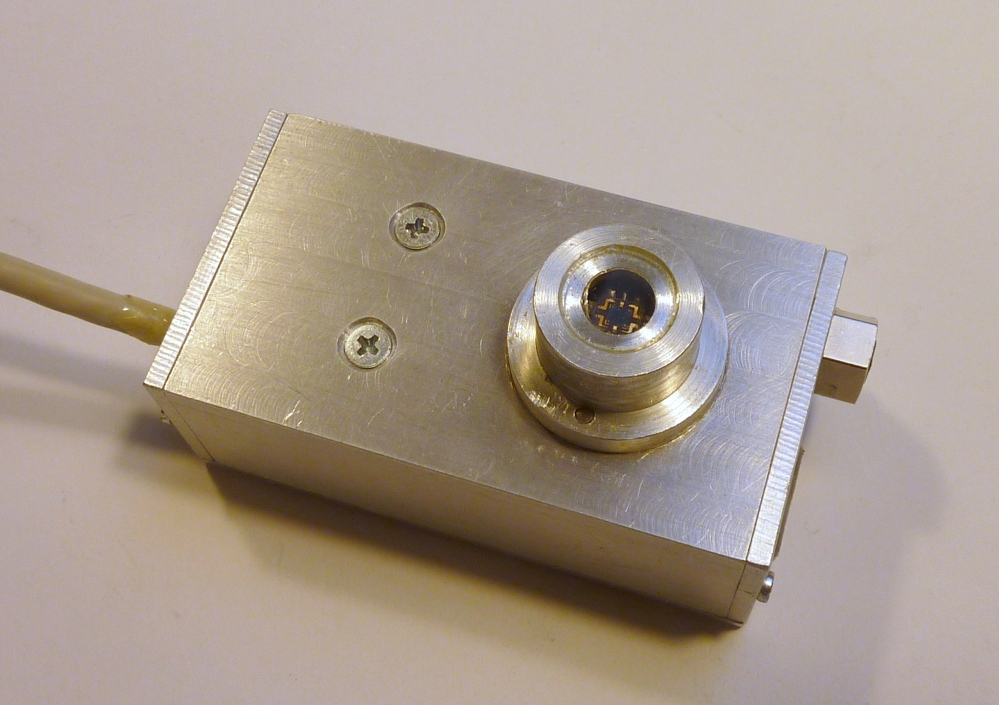
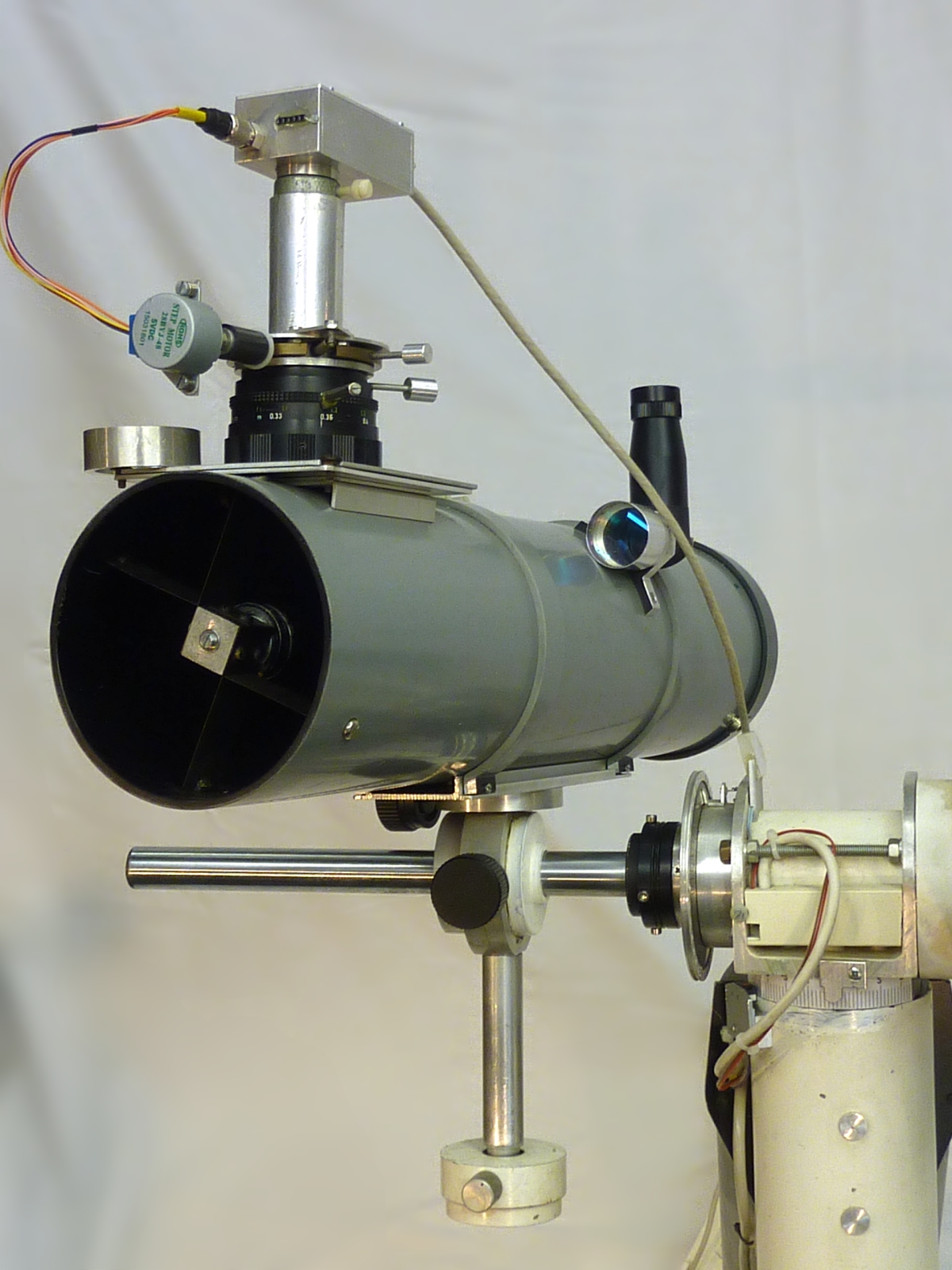
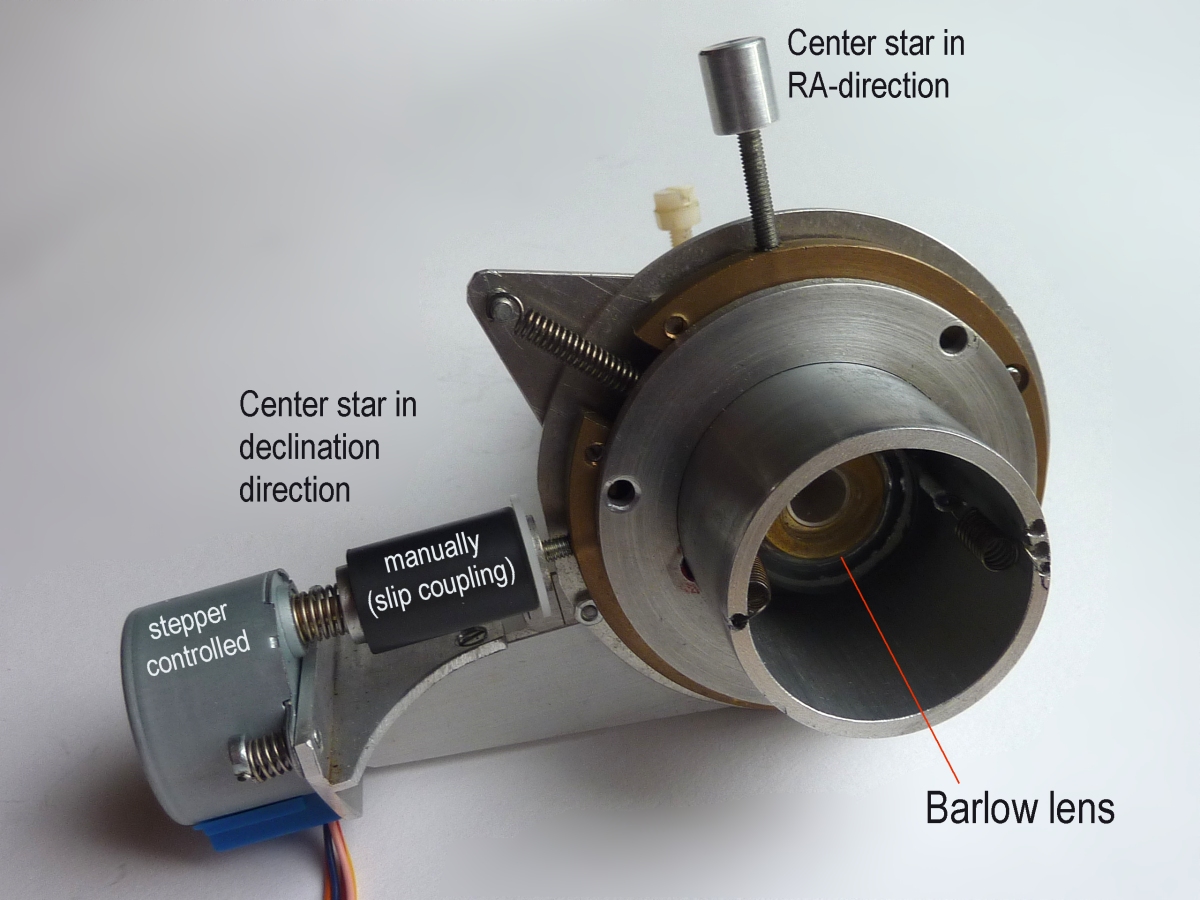
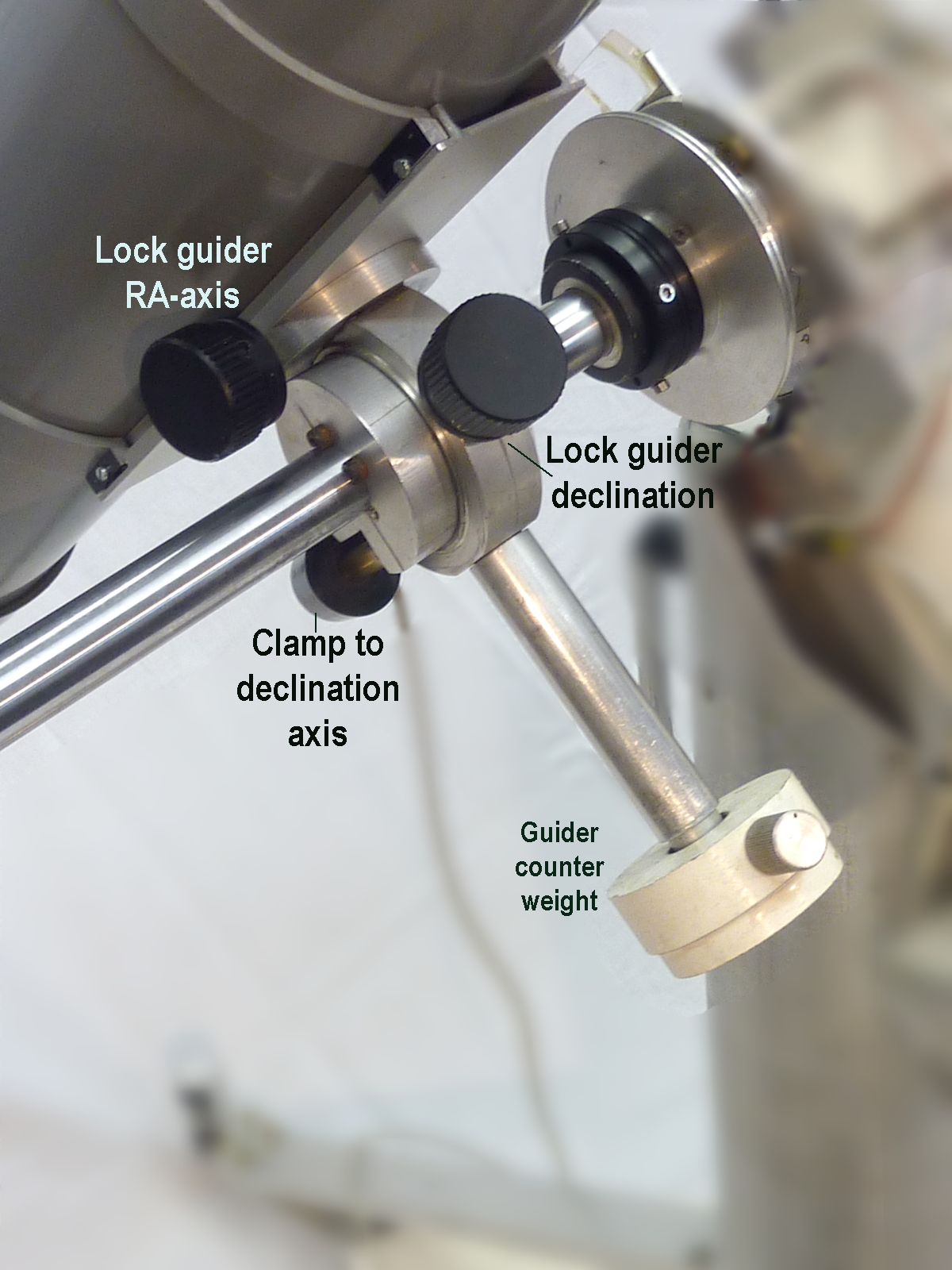
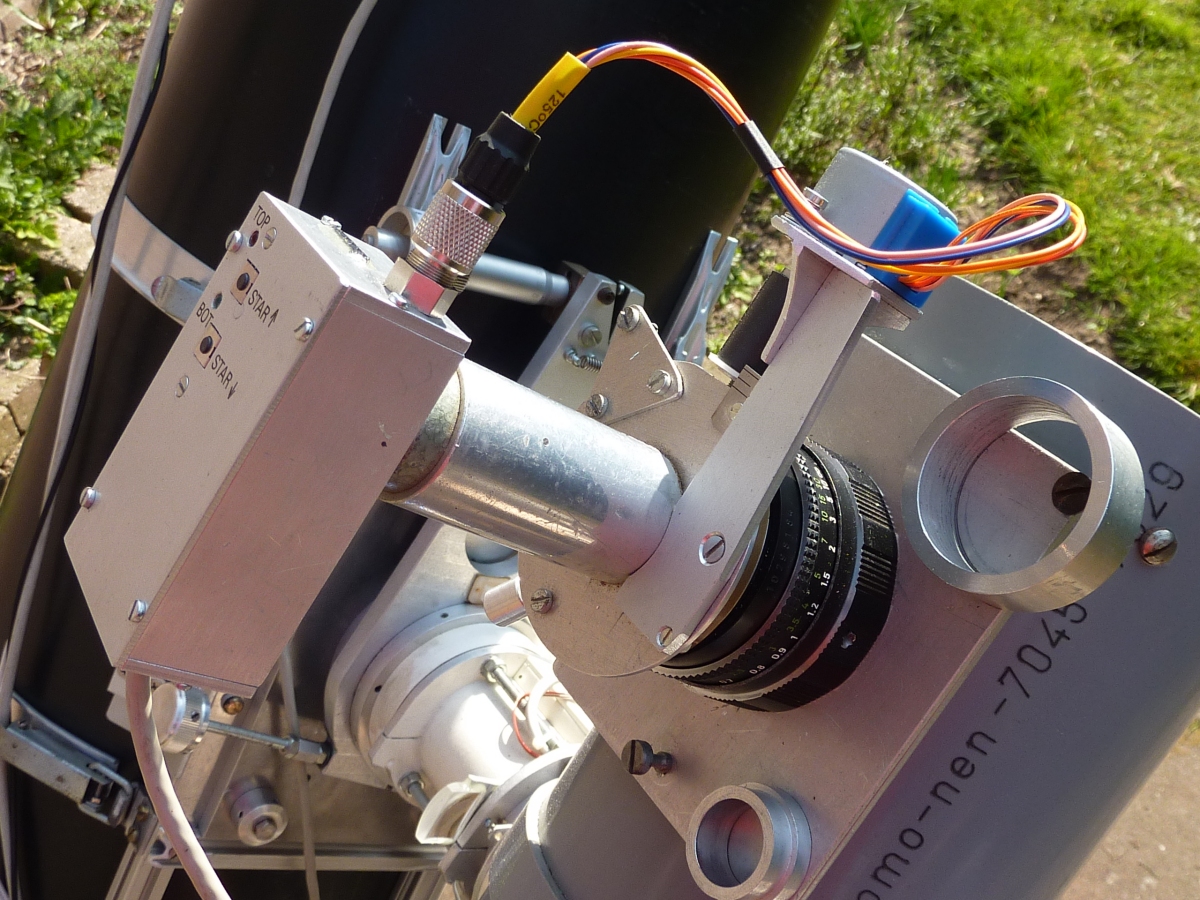
The home-made worm and wheel combination suffers a - more or less - periodic error of approximately 0.5'. To correct for this tracking error the 11cm Newton scope is fitted with a 4-quadrant sensor and 'barlow lens' (a short focal length negatieve lens taken from an old camera objective). The guiding scope is used as part of the counterweight and mounted on the declination axis. The barlow lens increases the 0.5m focal length of the 11cm Newton to approximately 1.9m. The 2mmx2mm surface area of the 4Q-sensor covers a maximum field of view of 0.06 degrees. The sensor measures the deviation in East/West and the North/South direction of the guide star from the center of the 4Q-sensor. This deviation is used to control the frequency of the RA-stepper motor and the (future) declination DC-motor such that the guide star remains centered. |
{kind=link}
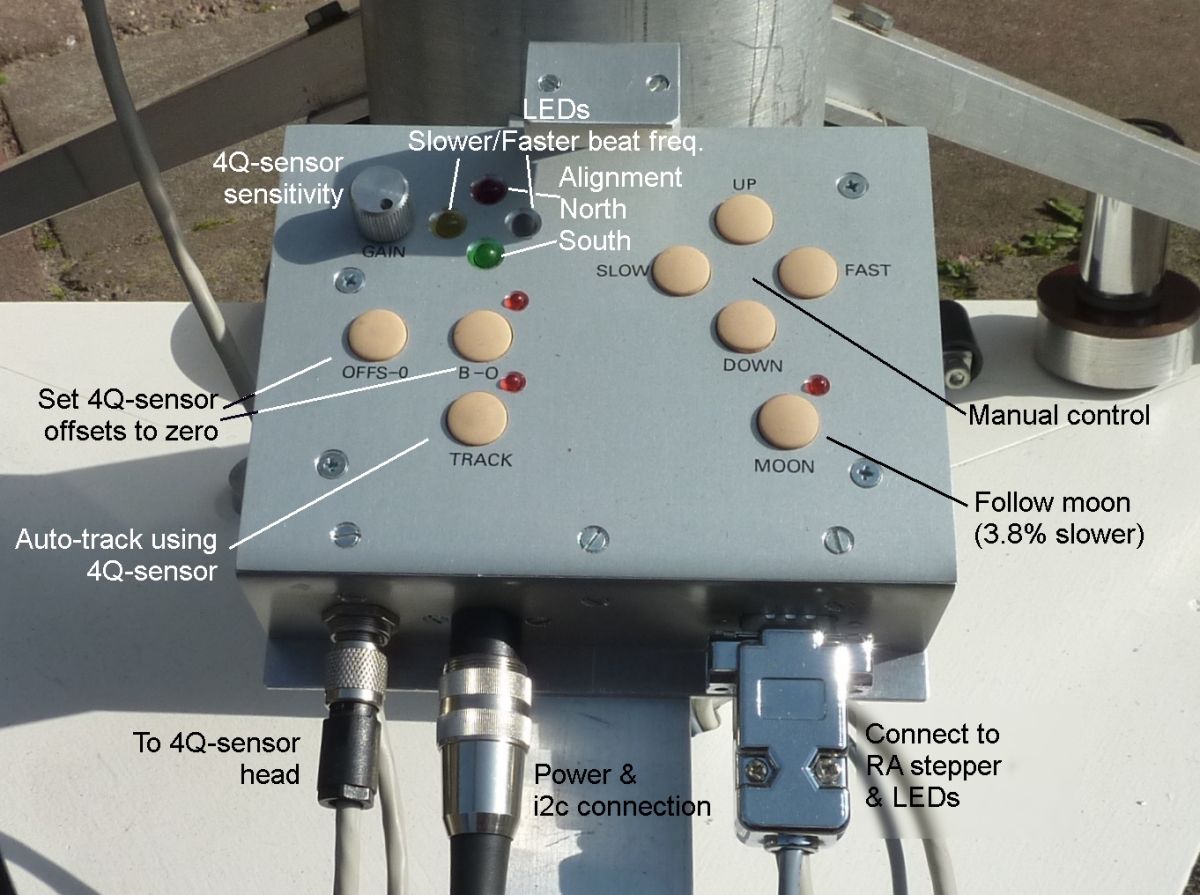
Images below give some more details. From left to right:
|
{kind=link}
{kind=link}
 |
 |
 |
 |
 |
 |
 |
|
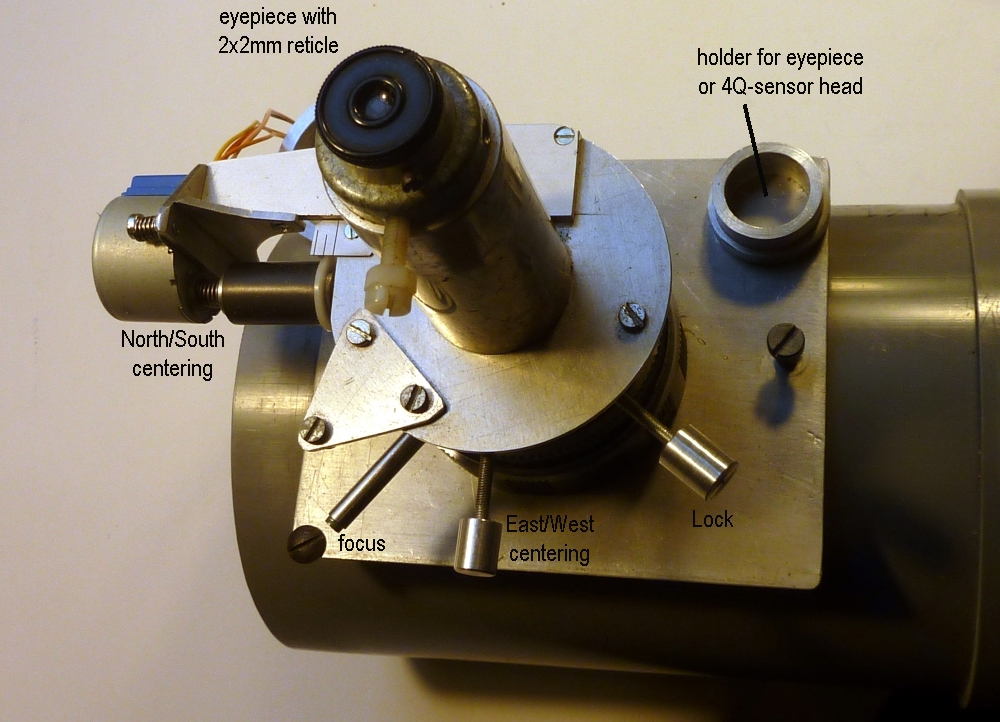
Way of working: After aiming and centering the main telescope on the object of interest, the procedure is to roughly aim the guider scope towards a magnitude 2 (or lower) star that is near this object. Rough alignment is done with the small view-finder attached to the side of the guider telescope tube and using the independent RA- and declination alignment of the guider's mount. Centering of the guide star is improved using a low magnification eye piece in the focuser. After placing the barlow-tube/centering module, the position of the guide star is observed with a small eye piece with 2x2mm reticle and (finally) centered manually adjusting the North-South and East-West position. Focus of the guide star is optimized. The signal offsets in North-South and East-West direction of the 4Q-sensor (with the 4Q-sensor head still in the blind holder) are registered using a push button on the mount controller). The 4Q-sensor head is now placed and automatic tracking started (another push-button on the mount controller). The controller will now drive the RA-stepper motor of the equatorial mount such that the error signal from the 4Q-sensor remains as close to zero as possible. During every dark image taken, the stepper performs a North-South scan to (re)center the guide star on the 4Q-sensor. |
{kind=link}
{kind=link}